
aee selfly pocket自拍無人機app
v1.0.2 安卓版- 應用大小:78.85 MB
- 應用語言:簡體中文
- 更新時間:2021-11-30
- 應用類型:國產軟件 / 系統工具
- 運行環境:Android
- 應用等級 :
- 官方主頁:http://www.aee.com
- 介紹說明
- 下載地址
- 精品推薦
- 相關軟件
- 網友評論
aee selfly無人機app是用于此型號的專用控制軟件,用戶在和無人機綁定后,能在手機上查看當前的信息。一鍵控制起飛和降落,超遠的無限距離,能無視各種地形,方便你快速進行航拍工作。
aeeselfly遙控器手機版介紹
aeeselfly軟件是官方推出的手機自拍無人機app,線上連接無人機設備,查看視頻內容,實時控制其飛行拍攝方向,實時狀態管理控制。

aeeselfly最新版特色
1、連接后,選擇您喜歡的駕駛模式并起飛
2、通過Wi-Fi通訊通過此應用進行控制
3、該應用程序通過Wi-Fi連接到您的SELFLY相機
4、欣賞FPV傳輸并捕獲2560 * 1440、1280 * 720 @ 20fps的視頻
5、易于使用的界面使駕駛非常簡單,即使是第一次駕駛也是如此
軟件功能
1、GPS跟隨模式
飛行器對攜帶手機者進行跟隨,跟隨水平距離10米左右
輕觸APP 上的&GPS跟隨& 按鍵觸發,再次點擊則取消跟拍
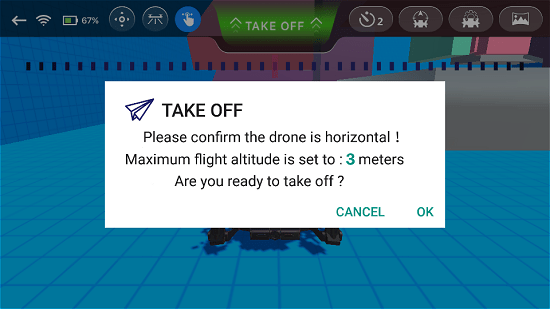
2、一鍵起飛
(先解鎖電機),在電機進入怠速情況下,點擊一鍵起飛按鈕,飛行器自動起飛到約2米高度并懸停
3、一鍵降落
飛行過程中,點擊一鍵降落按鈕,飛行器會垂直降落到正下方
飛機以當前懸停位置為圓心,自行退出一個半徑的距離,機頭朝向圓心,環繞圓心飛行。環繞過程中可控制飛行高度、半徑,環繞時請關閉新手模式
4、GPS返航
飛行器按照APP 設置的返航高度(20-120M ,默認30M) 自動返航,當前高度低于返航高度時,飛行器先上升至返航高度再返航,高于返航高度則直接返航
輕觸APP 上的GPS返航按鍵,點擊確認后飛行器執行自動返航,再次點擊則取消返航
5、漸遠飛行
漸遠飛行啟動,飛行器將在當前懸停位置基礎上,直接倒退飛行,并逐漸爬升高度,在飛行距離達到設置的距離后,飛行器將飛回原懸停位置
6、航線飛行
按照預先設定的航線飛行。航線飛行中,若取消航點飛行,需要退出航線飛行模式,才能重新控制飛行器飛行。航線高度默認為當前懸停高度,在航線飛行過程中,可以通過油門搖桿控制,調整航線飛行的高度
先下載離線地圖,進入地圖界。設置航點位置,點&GO&圖標,飛行器會依次飛行到各航點,在到達最后一個航點后,飛行器飛回初始懸停位置并懸停
包名:com.aee.selfly.pocketoa
MD5:896972a86bb3bea362d01beee223147b

下載地址
- Android版
aee selfly pocket自拍無人機app v1.0.2 安卓版
aee selfly pocket自拍無人機app v1.0.2 安卓版




本類熱門
熱門合集
-
下載
 亦辰畫質助手v13.1.9
21.04 MB / 2025-07-10
亦辰畫質助手v13.1.9
21.04 MB / 2025-07-10
-
下載
 EtchDroidv2.0
4.79 MB / 2025-06-08
EtchDroidv2.0
4.79 MB / 2025-06-08
-
下載
 谷歌appv130.0.6723.102
256.95 MB / 2024-11-18
谷歌appv130.0.6723.102
256.95 MB / 2024-11-18
-
下載
 mt管理器appv2.18.4
26.01 MB / 2025-01-05
mt管理器appv2.18.4
26.01 MB / 2025-01-05
-
下載
 游咔最新版v3.7.7
30.45 MB / 2024-10-18
游咔最新版v3.7.7
30.45 MB / 2024-10-18
-
下載
 幻影wifivHarmony0S版本3.0.0
3.96 MB / 2024-10-23
幻影wifivHarmony0S版本3.0.0
3.96 MB / 2024-10-23
-
下載
 vnc viewer手機版v4.9.2.60169
11.16 MB / 2025-06-20
vnc viewer手機版v4.9.2.60169
11.16 MB / 2025-06-20
-
下載
tm官理器v2.18.4
26.01 MB / 2025-07-08
-
下載
 萌物番v1.1
48.52 MB / 2025-08-04
萌物番v1.1
48.52 MB / 2025-08-04
-
下載
 小火箭shadowsocks軟件v1.5
13.6 MB / 2023-04-12
小火箭shadowsocks軟件v1.5
13.6 MB / 2023-04-12


















裝機必備
換一批























- 聊天
- 探探
- 陌陌
- 手機qq
- 手機微信
- 視頻
- 芒果tv
- 優酷視頻
- 愛奇藝
- 騰訊視頻
- 剪輯
- 威力導演
- 會聲會影
- 愛剪輯
- 剪映
- 音樂
- 酷我音樂
- 酷狗音樂
- 網易云音樂
- qq音樂
- 瀏覽器
- ie瀏覽器
- 火狐瀏覽器
- 谷歌瀏覽器
- 360瀏覽器
- 辦公
- office
- wps
- 企業微信
- 釘釘
- 輸入法
- 搜狗輸入法
- qq輸入法
- 五筆輸入法
- 訊飛輸入法
- p圖
- 美圖秀秀
- photoshop
- 光影魔術手
- lightroom
- 網盤
- 百度網盤
- 阿里云盤
- 115網盤
- 天翼云盤
- 郵箱
- qq郵箱
- outlook
- 阿里郵箱
- icloud
- 新聞
- 網易新聞
- 虎撲app
- 騰訊新聞
- 今日頭條
- 小說
- 咪咕閱讀
- 筆趣閣
- 追書神器
- 飛盧小說
- 動漫
- 漫畫島app
- 布卡漫畫
- 第一彈
- 騰訊動漫
- 攝影
- 一甜相機
- 天天p圖
- 水印相機
- b612相機
- 網購
- 天貓app
- 閑魚
- 京東app
- 拼多多
- 教育
- 安全教育平臺
- 滬江app
- 七天網絡
- 好分數
- 健康
- 疫苗app
- 掛號app
- 瑜伽app















網友評論